Pebble 源码剖析 - Skiplist
本章主要从源码角度来分析 Pebble 对 Skiplist(跳表)的高性能设计,对于跳表的介绍及原理可以参考 百科 或网上其他文章,本文不做冗余介绍。
数据结构
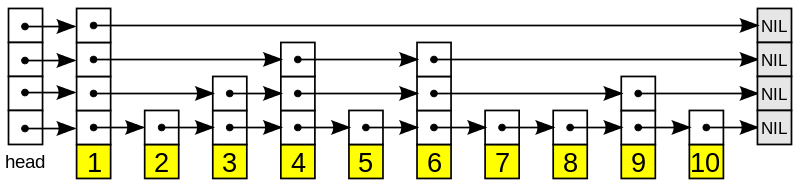
容易想到,跳表和普通链表类似,由多个节点组成,不同的是,每个节点有多层,因此会有多个 next 指针指向每层的下个节点,如下图:
跳表的逻辑结构很容易理解,使用链表这种数据结构实现非常直观。但是 Pebble 从高性能的角度出发,底层存储并未使用链表,而使用的是数组,通过 CAS 无锁技术,在并发场景下具备高效的性能。下面先来看看源码中几个关键的数据结构。
Skiplist
Skiplist 源码定义如下:
type Skiplist struct {
arena *Arena
cmp base.Compare
head *node
tail *node
height uint32 // Current height. 1 <= height <= maxHeight. CAS.
// If set to true by tests, then extra delays are added to make it easier to
// detect unusual race conditions.
testing bool
}
type Arena struct {
n uint64
buf []byte
}
可以看到整个结构比较简单,arena 代表跳表数据存储的地方,是一个固定大小的 buffer;cmp 代表跳表内节点值的比较函数;head 为头节点;tail 为尾节点;height 代表跳表的高度(节点当前最大层数);testing 为测试时候使用,可以忽略。
node
再来看看里面核心结构 node 的定义:
type node struct {
// Immutable fields, so no need to lock to access key.
keyOffset uint32
keySize uint32
valueSize uint32
allocSize uint32
tower [maxHeight]links
}
type links struct {
nextOffset uint32
prevOffset uint32
}
keyOffset 代表 key 在 arena 中的偏移,keySize 代表 key 的大小;valueSize 代表 value 的大小;allocSize 代表 node 占用的内存大小;tower 是一个数组,每个元素相当于每层的 pre-next 指针,指向各层的前一个节点和后一个节点。
可以看出 node 并未存储 key-value 的具体值,而是存的偏移和大小,value 的偏移并未存储,因为可以通过 keyOffset 和 keySize 间接计算出来。tower 比较形象,可以把节点看做塔一样,有多层,每层通过双向指针串联前后节点。因此 Skiplist 逻辑上是一个双向链表,Skiplist 在 Pebble 中的物理结构如下图:
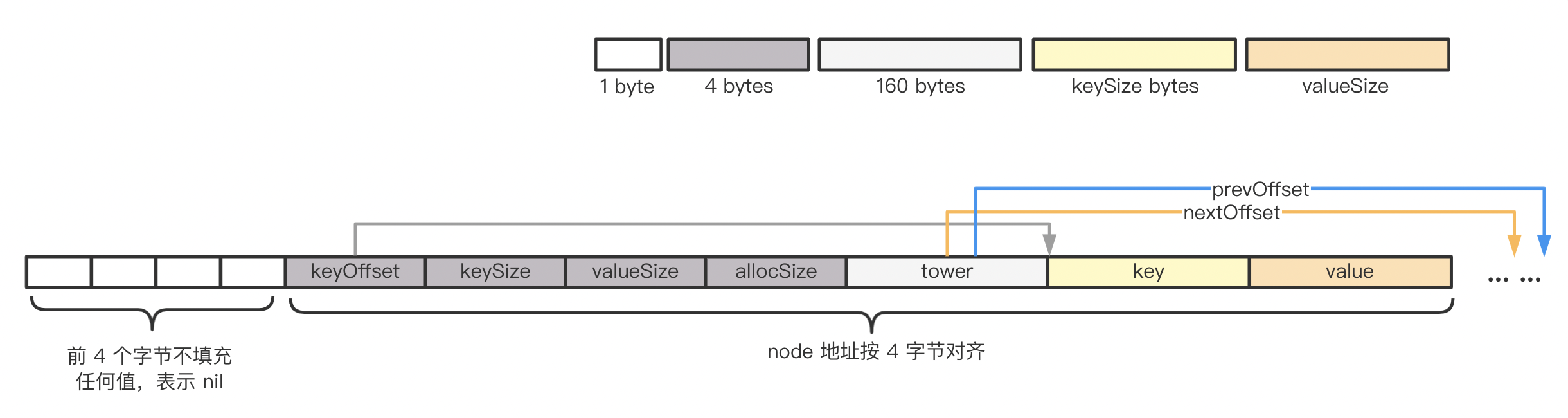
tower 指向的 node 个数有多个,图上只画了一对 link 表示节点在某层的前后节点偏移。
方法实现
了解 Skiplist 的数据结构定义后,接下来,看看如果操作 Skiplist,即 Skiplist 的相关方法实现。
创建跳表
func NewSkiplist(arena *Arena, cmp base.Compare) *Skiplist {
skl := &Skiplist{}
skl.Reset(arena, cmp)
return skl
}
创建 Skiplist 时,需要由外部传入 arena 和 cmp,Skiplist 的容量和比较函数由使用者决定。这里会调用 Reset 对 Skiplist 进行初始化操作,来看看具体实现逻辑:
func (s *Skiplist) Reset(arena *Arena, cmp base.Compare) {
// Allocate head and tail nodes.
head, err := newRawNode(arena, maxHeight, 0, 0)
if err != nil {
panic("arenaSize is not large enough to hold the head node")
}
head.keyOffset = 0
tail, err := newRawNode(arena, maxHeight, 0, 0)
if err != nil {
panic("arenaSize is not large enough to hold the tail node")
}
tail.keyOffset = 0
// Link all head/tail levels together.
headOffset := arena.getPointerOffset(unsafe.Pointer(head))
tailOffset := arena.getPointerOffset(unsafe.Pointer(tail))
for i := 0; i < maxHeight; i++ {
head.tower[i].nextOffset = tailOffset
tail.tower[i].prevOffset = headOffset
}
*s = Skiplist{
arena: arena,
cmp: cmp,
head: head,
tail: tail,
height: 1,
}
}
既然是初始化,那肯定是对 Skiplist 里面的成员变量进行初始化操作,arena 和 cmp 已经有了,很明显还需要对 head、tail、height 进行初始化赋值。首先通过 newRawNode 创建 head 节点和 tail 节点,由于 head 和 tail 不存储 key-value,因此 keyOffset 都初始化为 0,代表没有具体值;然后获取 head 和 tail 在 arena 中的偏移位置,并初始化 head.tower 的 nextOffset 和 tail.tower 的 prevOffset。
最后,Skiplist 中个成员变量初始化完毕,Skiplist 便算是创建成功了。接下来看看 newRawNode 的实现逻辑。
func newRawNode(arena *Arena, height uint32, keySize, valueSize uint32) (nd *node, err error) {
// Compute the amount of the tower that will never be used, since the height
// is less than maxHeight.
unusedSize := uint32((maxHeight - int(height)) * linksSize)
nodeSize := uint32(maxNodeSize) - unusedSize
nodeOffset, allocSize, err := arena.alloc(nodeSize+keySize+valueSize, align4, unusedSize)
if err != nil {
return
}
nd = (*node)(arena.getPointer(nodeOffset))
nd.keyOffset = nodeOffset + nodeSize
nd.keySize = keySize
nd.valueSize = valueSize
nd.allocSize = allocSize
return
}
newRawNode 会在 arena 中分配 node 所需内存大小,然后将成员变量的值存入 arena 中。由于节点的高度,即 tower 的层数小于等于 maxHeight,height 到 maxHeight 之间的 links 并不会使用,这里要计算出未使用的大小,然后再用节点最大大小减去未使用大小得到节点实际大小;
知道节点的大小后,便可以在 arena 中分配相应大小的内存空间,最后对 node 成员变量初始化,初始化的值则保存在 arena 中。
newRawNode 中分配 node 的内存时,采用 4 字节对齐,原因是 node 的每个变量都是 uint32(tower 元素中的成员变量也是),因此按 4 字节对齐时,cpu 访问内存获取变量值时更加高效,提升访存性能。字节对齐的好处可参考网上其他文章。
添加 key-value
func (s *Skiplist) Add(key base.InternalKey, value []byte) error {
var ins Inserter
return s.addInternal(key, value, &ins)
}
func (s *Skiplist) addInternal(key base.InternalKey, value []byte, ins *Inserter) error {
// 找到 key 要插入的位置
if s.findSplice(key, ins) {
return ErrRecordExists
}
nd, height, err := s.newNode(key, value)
if err != nil {
return err
}
// node 在 arena 中的偏移
ndOffset := s.arena.getPointerOffset(unsafe.Pointer(nd))
var found bool
var invalidateSplice bool
for i := 0; i < int(height); i++ {
prev := ins.spl[i].prev
next := ins.spl[i].next
if prev == nil {
if next != nil {
panic("next is expected to be nil, since prev is nil")
}
prev = s.head
next = s.tail
}
for {
// 获取 prev 和 next 的偏移
prevOffset := s.arena.getPointerOffset(unsafe.Pointer(prev))
nextOffset := s.arena.getPointerOffset(unsafe.Pointer(next))
nd.tower[i].init(prevOffset, nextOffset)
nextPrevOffset := next.prevOffset(i)
// next 的 prevOffset 不指向 prevOffset
if nextPrevOffset != prevOffset {
prevNextOffset := prev.nextOffset(i)
// prev 的 nextOffset 指向 next,说明 next 的 prevOffset 还没来得及修改
if prevNextOffset == nextOffset {
next.casPrevOffset(i, nextPrevOffset, prevOffset)
}
}
// cas 修改 prev 的 nextOffset
if prev.casNextOffset(i, nextOffset, ndOffset) {
// cas 修改 next 的 prevOffset
next.casPrevOffset(i, prevOffset, ndOffset)
break
}
// cas 失败,说明其他线程成功插入节点,需要重新计算 key 插入的位置
prev, next, found = s.findSpliceForLevel(key, i, prev)
if found {
if i != 0 {
panic("how can another thread have inserted a node at a non-base level?")
}
return ErrRecordExists
}
invalidateSplice = true
}
}
if invalidateSplice {
ins.height = 0
} else {
for i := uint32(0); i < height; i++ {
ins.spl[i].prev = nd
}
}
return nil
}
我们主要关注 addInternal,该方法利用循环+CAS,在并发场景下可以高效地插入节点。首先通过 findSplice 方法找到要插入的位置,位置保存在 ins 的 spl 中,该变量存储了每层的前后节点。找到位置后,创建节点并保存 key-value 值,然后再 for 循环中遍历每层的 prev 和 next,将节点插入 pre 和 next 之间,如下:
+----------------+ +------------+ +----------------+
| prev | | nd | | next |
| prevNextOffset |---->| | | |
| |<----| prevOffset | | |
| | | nextOffset |---->| |
| | | |<----| nextPrevOffset |
+----------------+ +------------+ +----------------+
插入节点时,首先将 nd 的 prevOffset 和 nextOffset 指向 prev 和 next;然后通过 for+cas 修改 prev 的 nextOffset 再修改 next 的 prevOffset,如果修改成功,退出内存循环,继续处理下一层,否则重新计算 node 在当前层的插入位置,继续重试。
注意,这里在更新 prev 的 nextOffset 和 next 的 prevOffset 前会先修正 next 的当前 prevOffset,因为可能存在另一个线程正在插入的节点是 prev,而 prev 的 nextOffset 已经指向了 next,但是 next 的 prevOffset 还未来得及指向 prev。为了保证 cas 正确性,需要帮助另一线程将 next 的 prevOffset 指向 prev。
查找 key
Skiplist 的查找及遍历都是通过迭代器 Iterator 实现的,这里只列出最基础的查找方法:
func (it *Iterator) seekForBaseSplice(key []byte) (prev, next *node, found bool) {
ikey := base.MakeSearchKey(key)
level := int(it.list.Height() - 1)
prev = it.list.head
for {
prev, next, found = it.list.findSpliceForLevel(ikey, level, prev)
if found {
if level != 0 {
// next is pointing at the target node, but we need to find previous on
// the bottom level.
prev = it.list.getPrev(next, 0)
}
break
}
if level == 0 {
break
}
level--
}
return
}
该方法逻辑非常简单,初始查找节点为 head,然后从最高层开始查找,如果找到目标节点(注:next 才是目标节点),则将 next 0 层的前一个节点赋给 prev(必须最底层才能代表真正的前节点);如果没有找到,则继续根据 prev 节点查找下一层,直到 0 层如果还未找到,说明目标值不存在。
我们继续看下 findSpliceForLevel 的逻辑:
func (s *Skiplist) findSpliceForLevel(
key base.InternalKey, level int, start *node,
) (prev, next *node, found bool) {
prev = start
for {
// Assume prev.key < key.
next = s.getNext(prev, level)
if next == s.tail {
break
}
offset, size := next.keyOffset, next.keySize
nextKey := s.arena.buf[offset : offset+size]
n := int32(size) - 8
cmp := s.cmp(key.UserKey, nextKey[:n])
if cmp < 0 {
// We are done for this level, since prev.key < key < next.key.
break
}
if cmp == 0 {
// User-key equality.
var nextTrailer uint64
if n >= 0 {
nextTrailer = binary.LittleEndian.Uint64(nextKey[n:])
} else {
nextTrailer = uint64(base.InternalKeyKindInvalid)
}
if key.Trailer == nextTrailer {
// Internal key equality.
found = true
break
}
if key.Trailer > nextTrailer {
// We are done for this level, since prev.key < key < next.key.
break
}
}
// Keep moving right on this level.
prev = next
}
return
}
func (s *Skiplist) getNext(nd *node, h int) *node {
offset := atomic.LoadUint32(&nd.tower[h].nextOffset)
return (*node)(s.arena.getPointer(offset))
}
从 start 节点开始(start.key < key),获取 next 节点,getNext 内部通过原子操作获取 next 的偏移,有了偏移便可通过 arena 获取 buffer 中的 nextKey,然后比较 key 和 nextKey 的原始值(去掉 key 的后 8 位 Trailer,key 的格式参考之前的文章),如果 userKey 相等,接着比较 Trailer,如果相等,则找到目标节点;Trailer 越大,说明 key 越小(Trailer 大说明版本更新,应该排在前面),如果 key 的 Trailer 大于了 nextTrailer,那就每必要往后找了,因为后面的 Trailer 更小,反之,继续遍历下一节点。
到这里,暂且介绍完了 skiplist 最基本的方法 – 创建、添加、查找,根据方法的实现可以帮助大家更清晰的认识 Pebble 对 Skiplist 的实现原理及使用方式。
总结
本文主要通过对源码解析,介绍了 Pebble 如何实现一个高性能无锁的 Skiplist,并介绍了 Skiplist 的几种最基本的方法,便于加深大家对 Skiplist 的理解,也利于后续源码探索。